Recap: Google Cloud Summit, Cloud Derby
Recap: Google Cloud Summit, Cloud Derby
- Last Updated: December 2, 2024
Eric Zhang
- Last Updated: December 2, 2024

On October 30, 2018, I ventured down to Washington, D.C. to attend the Google Cloud Summit with my fellow Leverege coworkers, Yitaek Hwang, and Sameer Srivastava. The Google Cloud Summit is a day-long event for developers, customers, and partners to explore new ideas and learn from industry experts.
One of the highlights from this event was the Cloud Derby: a full-day coding competition in which small teams build self-driving (autonomous) robots and compete against each other. Similar to the Hour of Code and Minecraft workshops by Code.org, the Cloud Derby is primarily an educational tool. It offers participants a hands-on “Hello World” experience in robotics, machine learning, and the Google Cloud Platform (GCP).
Image Credit: Leverege
The goal for each robot is to locate and retrieve balls of a specific color from a level playing field, as quickly as possible, by relying on image data from a small camera module. The images are sent to the cloud, where they're translated into precise movement instructions and relayed back to the robot.
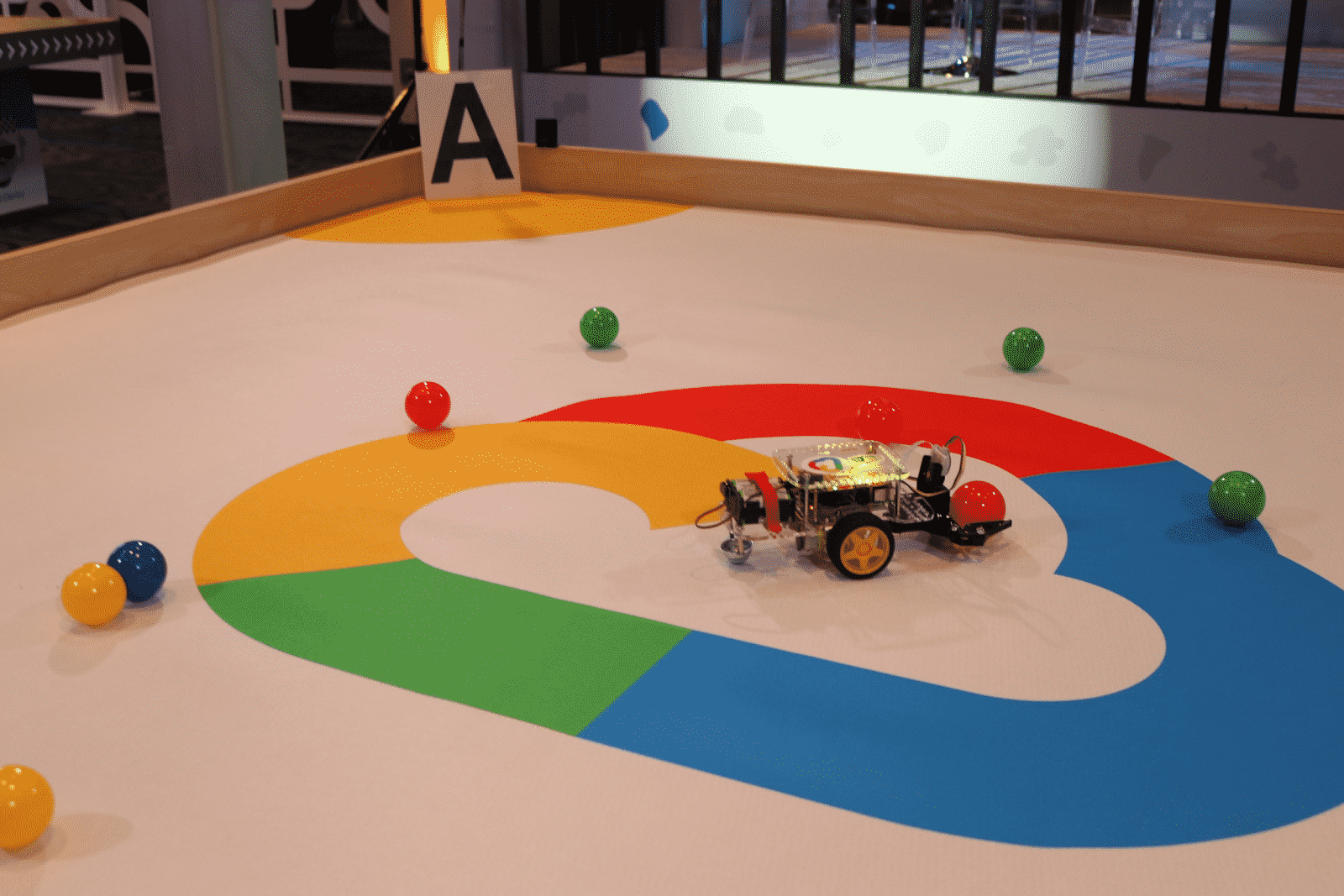
Image Credit: Leverege
Over the course six-hours, we worked through the instructions provided with support from Google engineers to set up IoT Core, Pub/Sub, TensorFlow, and other GCP services, and learned about how each of these services plays a role in the system as a whole.

Image Credit: cloudderby.io
By the end of the session, we had a working robot that could be either controlled manually through a web interface or left to rely on a mounted camera to locate and retrieve colored balls in self-driving mode. As an educational tool, this session/workshop is an excellent way to demonstrate how robotics and machine learning can be used in conjunction to automate basic tasks through IoT. For students and tech professionals looking to expand on knowledge and experience with interfacing sensors and the cloud, this is a great, beginner-friendly starting point.
To follow the latest Cloud Derby news or build your own robot, visit cloudderby.io for more information.
This post was originally published on Leverege's blog.
The Most Comprehensive IoT Newsletter for Enterprises
Showcasing the highest-quality content, resources, news, and insights from the world of the Internet of Things. Subscribe to remain informed and up-to-date.
New Podcast Episode

IoT Is Finally Delivering
Related Articles